We use cookies to make your experience better. To comply with the new e-Privacy directive, we need to ask for your consent to set the cookies. Learn more.

Pololu: Orientation Sensor, 3-Axis Accelerometer, Gyro, and Magnetometer - UM7-LT
Special Price
PKR 65,200.00
Regular Price
PKR 71,500.00
SKU
MD-01874
The UM7-LT orientation sensor from Redshift Labs is an Attitude and Heading Reference System (AHRS) that contains a three-axis accelerometer, rate gyro, and magnetometer. It combines this data using an Extended Kalman Filter to produce attitude and heading estimates. This LT version of the UM7 does not have an enclosure.
Overview
The UM7 orientation sensor is a third-generation Attitude and Heading Reference System (AHRS) from Redshift Labs that produces attitude and heading estimates from triaxial accelerometer, rate gyro, and magnetometer data. Unlike a typical inertial measurement unit (IMU), which only provides raw sensor readings, the UM7 features an onboard microcontroller that combines sensor data using a sophisticated Extended Kalman Filter (EKF) to generate orientation estimates 500 times a second.
Two versions of the UM7 are available: the UM7 orientation sensor, which includes an enclosure, and the UM7-LT, which does not. The two versions are functionally equivalent, and both include a cable.
|

The UM7 features a number of improvements over its predecessor, the UM6, including higher gyro bias stability and lower noise, a new communication architecture for improved flexibility, optional NMEA packet transmission, UTC time-synchronization with external GPS, and support for third-order temperature compensation on all sensors. It takes advantage of newer MEMS (micro-electro-mechanical systems) technology that allows it to offer better performance at a lower price.
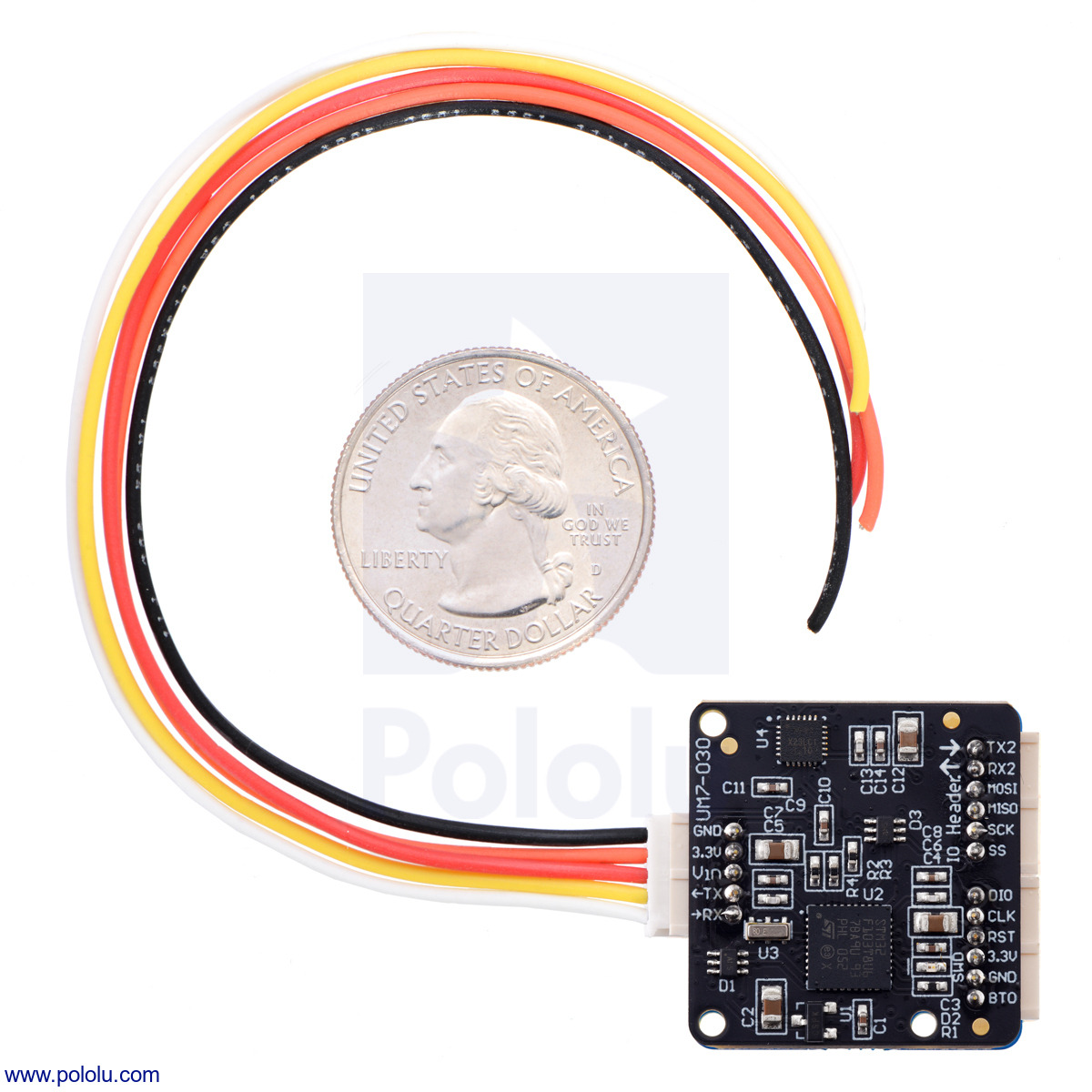
Connections for power and TTL serial communication can be made to the UM7 through a polarized five-pin male connector on one side, which mates with an included cable assembly. A pair of six-pin expansion headers on the other side of the board provide additional connectivity options, including an alternative SPI interface and a secondary serial interface that can be connected to an external GPS module (like our LS20031 GPS receiver). Additional cable assemblies for the expansion headers are not included.
You can use a general-purpose USB-to-TTL-serial adapter, such as our CP2104 carrier or USB AVR programmer, to connect the UM7 to your computer. You can then use the Redshift Serial Interface (available in the “Resources” tab) to configure the sensor, and view and log data in real-time.
LT version of the UM7, which is just the UM7 electronics without the enclosure.
|
|
Features
Sensors and processing
- Excellent gyro bias stability over temperature
- Adjustable low-pass filter and EKF settings provide customizable performance for various applications
- States and sensor data synchronized to GPS position and velocity using optional external GPS module
- Allows for alignment calibration and third-order bias and scale factor temperature compensation for accelerometers, gyros, and magnetometer
- Magnetometer soft and hard-iron calibration can be performed through the serial interface software
Communication
 |
|
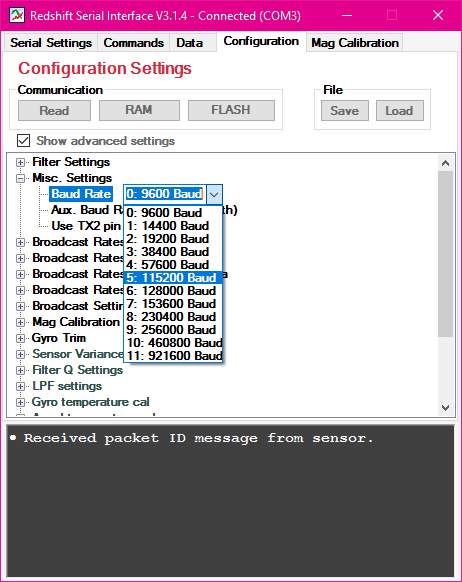
Redshift Serial Interface. |
|---|
 |
|
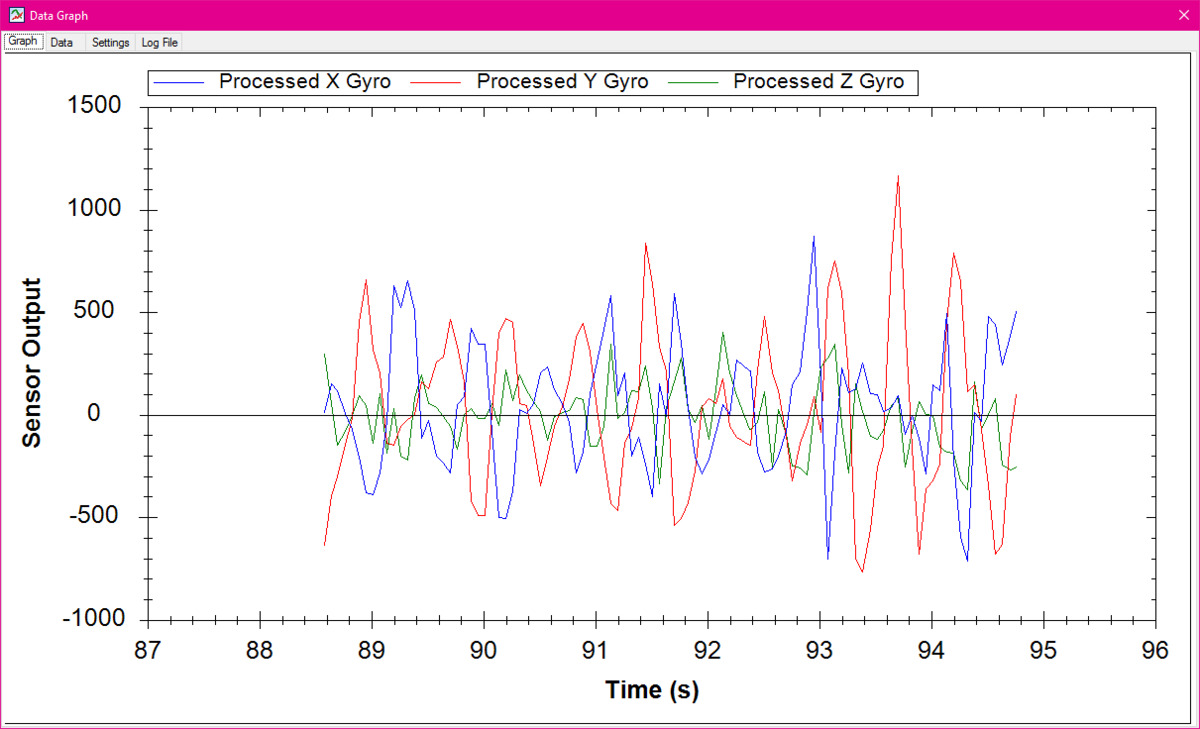
Graph of gyro readings displayed by the Redshift Serial Interface connected to a UM7 orientation sensor. |
|---|
- Output data:
- Attitude and heading (Euler angles)
- Attitude quaternion
- magnetometer, accelerometer, gyro data
- GPS altitude, position, velocity (with optional external GPS)
- 3.3 V TTL serial interface (UART) with baud rates up to 921,600 bps can stream data or provide updates on request
- Note: the main UART pins, TX, and RX, are 5V-tolerant and can be directly connected to 5 V systems that are guaranteed to read 3.3 V as high
- Transmits data using human-readable NMEA strings (up to 100 Hz broadcast), binary packets for higher efficiency (up to 255 Hz broadcast), or a combination of both
- Flexible communication architecture allows UM7 to transmit any combination of data at individually adjustable rates
- Connects to the Redshift Serial Interface software to allow for real-time plotting of sensor data, logging, device configuration, and magnetometer calibration
- SPI interface available through expansion connector
Specifications
- UM7-LT (no enclosure):
- Dimensions: 1.06″ × 1.02″ × 0.26″ (27 mm × 26 mm × 6.5 mm)
- Weight: 0.12 oz (3.5 g) without cable
- UM7 (with enclosure):
- Dimensions: 1.09″ × 1.12″ × 0.37″ (28 mm × 28 × 9 mm) without mounting tabs
- Weight: 0.26 oz (7.5 g) without cable
- Operating voltage: 4 V to 5.5 V
- I/O logic level: 3.3 V (with 5V-tolerant main UART pins, TX and RX)
Attitude and heading
- EKF estimation rate: 500 Hz
- ±1° typical static pitch/roll accuracy
- ±3° typical dynamic pitch/roll accuracy
- ±3° typical static yaw accuracy
- ±5° typical dynamic yaw accuracy
- 0.5° angle repeatability
- <0.01° angular resolution
The UM7-LT and UM7 orientation sensors were originally developed by CH Robotics, and Redshift Labs is now manufacturing and supporting them. Some components have been updated on these versions of the sensors, and the UM7-LT now ships with a conformal coating, but the sensors should otherwise be functionally identical to the previous versions.
| Part Number | UM7-LT |
|---|---|
| Manufacturer | Pololu |
| Weight (KG) | 0.010000 |
| Packing Unit | 1 Piece |
| Product Availability | In Stock |
Write Your Own Review